您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)

200SMART新功能:通信實現(xiàn)V90 PN基本定位控制
S7-200 SMART新功能:通過PROFINET通信實現(xiàn)V90 PN基本定位控制
從STEP 7-Micro/WIN SMART V2.4 和 S7-200 SMART PLC(固件版本 V2.4)開始增加了 PROFINET通信的功能。通過PROFINET接口可與V90 PN伺服驅(qū)動器進行通信連接,此接口可支持八個連接(IO 設備或驅(qū)動器)。
此新功能的推出為用戶提供了更加經(jīng)濟實用的運動控制解決方案。
1 需要的軟件
為了實現(xiàn)S7-200 SMART 對V90 PN的基本定位控制,需要安裝如下軟件:
· STEP 7-Micro/WIN SMART V2.4 調(diào)試軟件
· STEP 7 Micro/WIN V2.4 SINAMIC control 庫更新工具
· SINAMICS V-ASSISTANT 軟件
2 可實現(xiàn)的運動控制功能
使用SINAMIC control 庫中的SINA_POS功能塊,可以實現(xiàn)以下運動控制功能:
· 相對定位
· 定位
· 連續(xù)運行模式(按速度運行)
· 主動回零
· 直接設置回零位置
· 運行程序段 0~15
· 按速度點動
· 按距離點動
3 V90 PN的設置要求
使用調(diào)試軟件V-Assistant對V90 PN進行項目配置的要點如下:
· 設置控制模式為“基本位置控制(EPOS)”
· 配置通信報文為西門子報文111
4 SINA_POS定位控制功能塊介紹
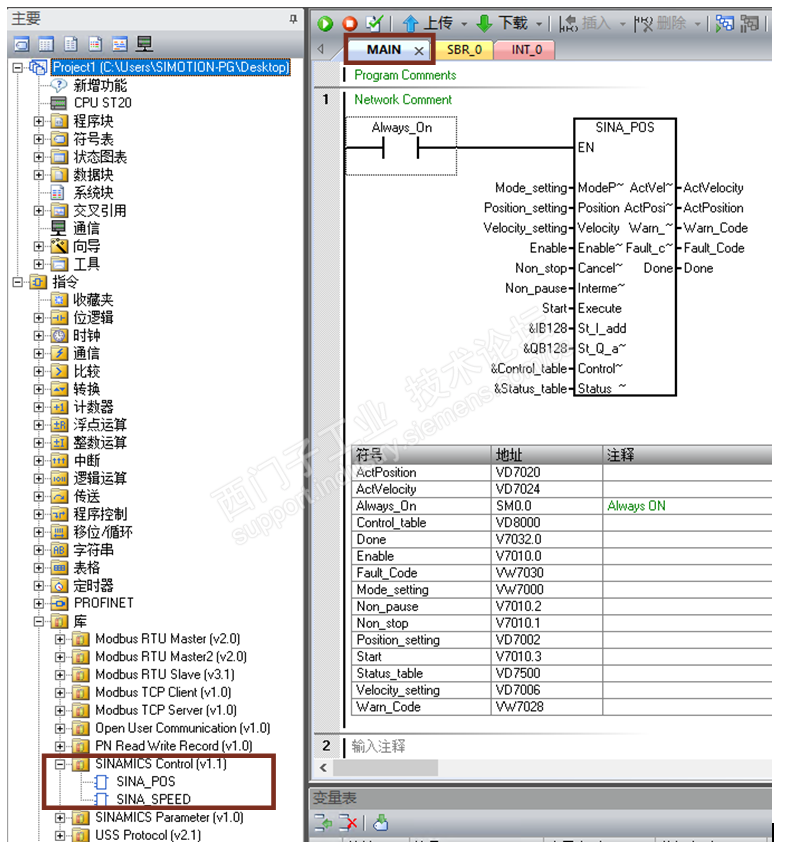
安裝STEP 7 Micro WIN V2.4 SINAMIC control 庫更新工具后,STEP 7-Micro/WIN SMART 調(diào)試軟件中就提供了的SINAMICS Control[v1.1]庫,可在以MAIN任務中調(diào)用位置控制功能塊SINA_POS,如下圖所示:
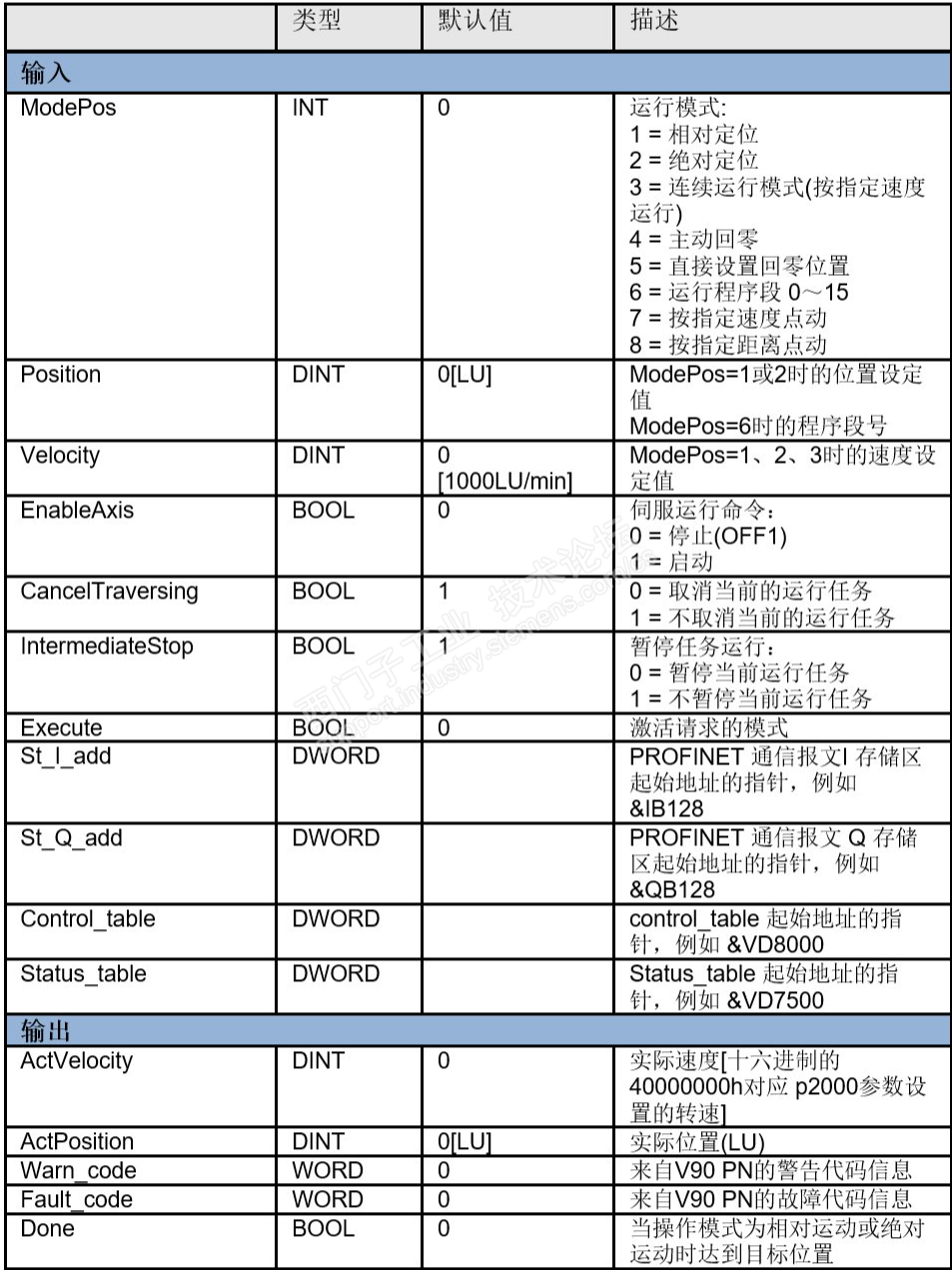
SINA_POS輸入輸出說明見下表。
5 項目配置要點
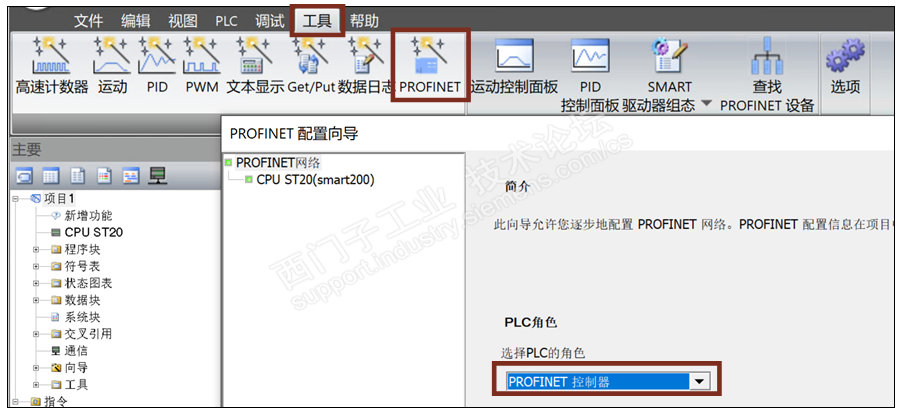
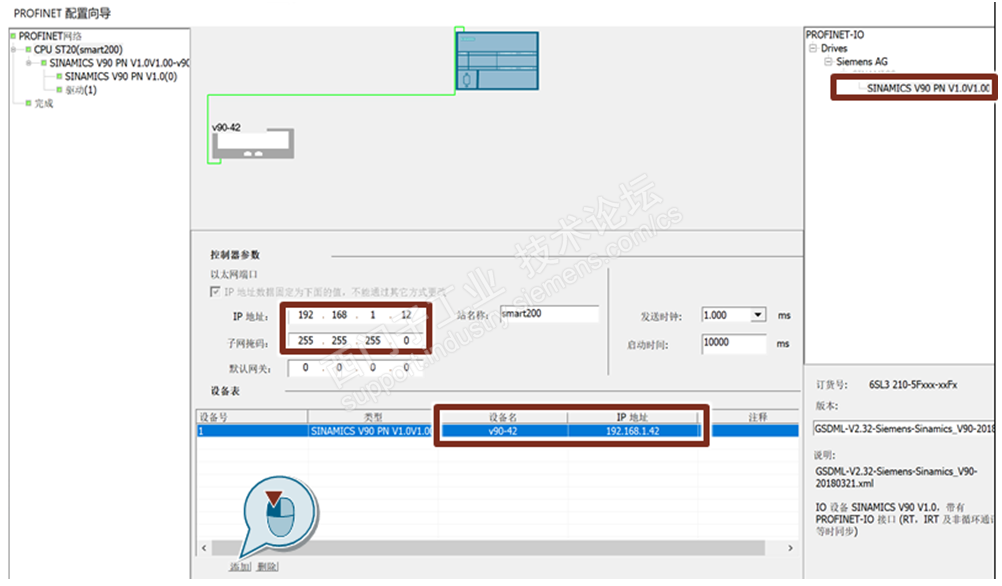
在STEP 7 Micro WIN V2.4 軟件中創(chuàng)建S7-200 SMART項目,通過向?qū)Чδ埽銹ROFINET 通信站點和報文信息。
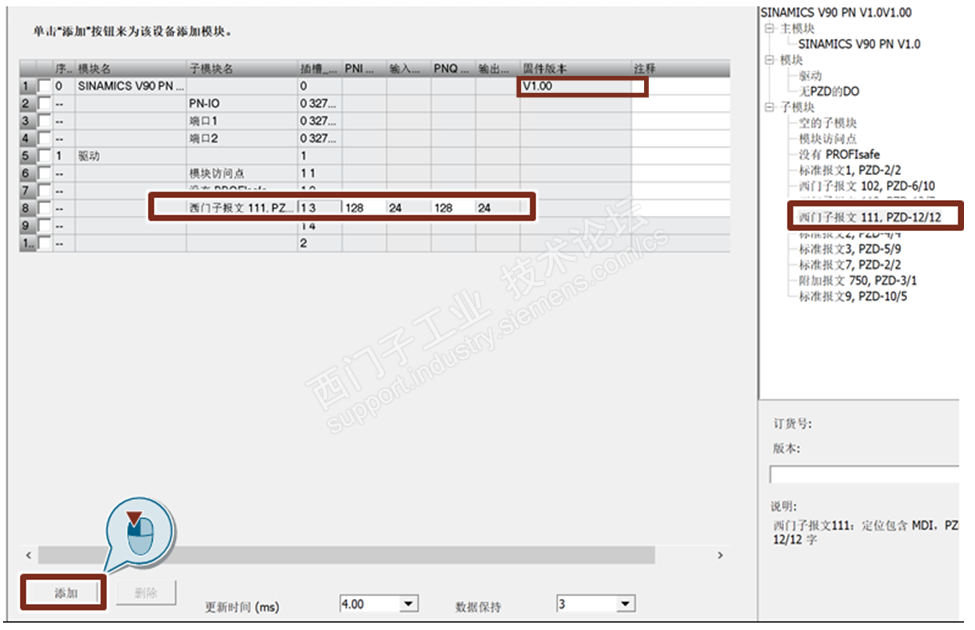
添加V90 PN,并設置IP 地址及 設備名稱:
在配置報文的視圖中拖拽西門子報文111到模塊列表中,小的更新時間為4 ms: