 手機(jī)版
手機(jī)版 化工儀器網(wǎng)手機(jī)版
化工儀器網(wǎng)手機(jī)版
 化工儀器網(wǎng)小程序
化工儀器網(wǎng)小程序
 官方微信
官方微信 公眾號(hào):chem17
公眾號(hào):chem17
 掃碼關(guān)注視頻號(hào)
掃碼關(guān)注視頻號(hào)

驗(yàn)儀器設(shè)備有限公司")









基于機(jī)器學(xué)習(xí)的實(shí)時(shí)可見疲勞裂紋擴(kuò)展檢測(cè)
Machine learning-based real-time visible fatigue crack growth detectio
作者:Le Zhang, Zhichen Wang , Lei Wang , Zhe Zhang , Xu Chen, Lin Meng
摘要:航空航天和汽車工業(yè)中應(yīng)用了許多大型和復(fù)雜的結(jié)構(gòu)部件。然而,在使用過程中,反復(fù)的交變或循環(huán)載荷往往會(huì)導(dǎo)致意外的疲勞斷裂。因此,開發(fā)實(shí)時(shí)可見的疲勞裂紋萌生和擴(kuò)展監(jiān)測(cè)方法對(duì)結(jié)構(gòu)安全至關(guān)重要。本文提出了一種結(jié)合計(jì)算機(jī)視覺和機(jī)器學(xué)習(xí)的基于機(jī)器學(xué)習(xí)的疲勞裂紋擴(kuò)展檢測(cè)方法。在我們的模型中,計(jì)算機(jī)視覺用于數(shù)據(jù)創(chuàng)建,機(jī)器學(xué)習(xí)模型用于裂紋檢測(cè)。然后使用計(jì)算機(jī)視覺對(duì)裂紋的擴(kuò)展路徑和長(zhǎng)度進(jìn)行標(biāo)記和分析。我們應(yīng)用了7種模型進(jìn)行裂縫分類,發(fā)現(xiàn)決策樹是本研究中模型。實(shí)驗(yàn)結(jié)果證明了該方法的有效性,實(shí)現(xiàn)的裂縫長(zhǎng)度測(cè)量精度為0.6 mm。此外,輕微的機(jī)器學(xué)習(xí)模型幫助我們實(shí)現(xiàn)了實(shí)時(shí)可見的疲勞裂紋檢測(cè)。
關(guān)鍵詞:疲勞裂紋、擴(kuò)展預(yù)測(cè)、機(jī)械響應(yīng)、發(fā)光材料結(jié)構(gòu)健康監(jiān)測(cè)、計(jì)算機(jī)視覺、機(jī)器學(xué)習(xí)
1.簡(jiǎn)介
航空、汽車工業(yè)中應(yīng)用了許多大型、復(fù)雜的結(jié)構(gòu)部件,如發(fā)動(dòng)機(jī)、渦輪等。其中一些在使用中受到反復(fù)交變或循環(huán)載荷的作用,容易產(chǎn)生意外的疲勞斷裂。因此,開發(fā)實(shí)時(shí)可見的疲勞裂紋萌生和擴(kuò)展監(jiān)測(cè)方法對(duì)結(jié)構(gòu)安全至關(guān)重要。在過去的幾十年里,工業(yè)上廣泛發(fā)展了用于疲勞損傷評(píng)估的結(jié)構(gòu)健康監(jiān)測(cè)(SHM)方法。壓電傳感器、紅外熱成像、聲發(fā)射、蘭姆波和數(shù)字圖像相關(guān)(DIC)等技術(shù)在飛機(jī)結(jié)構(gòu)安全監(jiān)測(cè)中得到了廣泛應(yīng)用。然而,有限的傳感器尺寸、高成本和復(fù)雜的測(cè)量系統(tǒng)以及復(fù)雜的加工程序限制了它們?cè)诖笮蛷?fù)雜結(jié)構(gòu)部件上的應(yīng)用。目前迫切需要一種現(xiàn)場(chǎng)、實(shí)時(shí)、可見的SHM疲勞損傷評(píng)價(jià)方法。
基于熒光的檢測(cè)技術(shù)具有可視化和快速響應(yīng)的優(yōu)點(diǎn)。因此,在生物、化學(xué)、光電子等領(lǐng)域得到了廣泛的應(yīng)用。機(jī)械-發(fā)光(machine -noluminescence, ML)材料在機(jī)械響應(yīng)的測(cè)量中被考慮,其中,當(dāng)ML材料受到機(jī)械力的作用時(shí),熒光波長(zhǎng)或強(qiáng)度可以發(fā)生變化。因此,ML現(xiàn)象對(duì)于實(shí)現(xiàn)對(duì)應(yīng)力分布和疲勞裂紋行為等機(jī)械響應(yīng)的實(shí)時(shí)、直接可見的監(jiān)測(cè)有很大的好處。許多無機(jī)物基ML材料,如SrAl2O4:Eu2t、Dy3t、Nd3t(SAO)和CdSe@ZnS顆粒,被混合在陶瓷中或涂覆在金屬表面,從而可以實(shí)現(xiàn)對(duì)疲勞裂紋擴(kuò)展的實(shí)時(shí)可見監(jiān)測(cè)。1,1,2,2-四基(4-硝基苯基)乙烷(TPE-4N)是一種純有機(jī)機(jī)械響應(yīng)發(fā)光材料(MRL)。它在無定形狀態(tài)下表現(xiàn)出強(qiáng)烈的綠色熒光,而在結(jié)晶狀態(tài)下其發(fā)射則被強(qiáng)烈猝滅。與無機(jī)ML材料相比,純有機(jī)MRL材料在金屬表面具有良好的成膜性,為大型復(fù)雜結(jié)構(gòu)件疲勞損傷評(píng)估的現(xiàn)場(chǎng)、實(shí)時(shí)、可見監(jiān)測(cè)開辟了新的可能性。通常,疲勞損傷出現(xiàn)在材料表面。因此,金屬表面的誘導(dǎo)熒光可以用來表征疲勞損傷。要使該技術(shù)真正應(yīng)用,必須實(shí)現(xiàn)疲勞裂紋損傷的自動(dòng)監(jiān)測(cè)和保護(hù)報(bào)警。因此,在目前的工作中,應(yīng)用計(jì)算機(jī)視覺和機(jī)器學(xué)習(xí)來實(shí)現(xiàn)對(duì)熒光分布的監(jiān)測(cè),熒光分布代表疲勞的發(fā)生和傳播。
在計(jì)算機(jī)視覺的研究領(lǐng)域,裂紋檢測(cè)可能定義為一種目標(biāo)檢測(cè)方法,并取得了良好的性能。在某些情況下,機(jī)器學(xué)習(xí)模型通過使用計(jì)算機(jī)視覺提取的圖像特征對(duì)物體進(jìn)行分類。例如,甲骨文(Oracle Bone Inscription, OBI)是一種刻在骨頭上的類似裂縫的文字,利用計(jì)算機(jī)視覺技術(shù)和機(jī)器學(xué)習(xí)模型對(duì)甲骨文進(jìn)行分類就取得了很好的效果。此外,隨著計(jì)算能力的不斷提高,深度學(xué)習(xí)技術(shù)被廣泛用于具有更高精度的目標(biāo)檢測(cè)。深度學(xué)習(xí)方法在OBI分類中也取得了很好的準(zhǔn)確率。
因此,提出的工作研究計(jì)算機(jī)視覺和機(jī)器學(xué)習(xí)方法,通過有機(jī)MRL方法實(shí)時(shí)和可見地監(jiān)測(cè)疲勞裂紋檢測(cè)。將金屬中的疲勞裂紋起裂和裂紋擴(kuò)展路徑轉(zhuǎn)換為可見的熒光信號(hào)。在檢測(cè)過程上,首先通過計(jì)算機(jī)視覺提取圖像特征作為預(yù)處理,然后采用機(jī)器學(xué)習(xí)方法對(duì)裂紋和非裂紋進(jìn)行分類。最后,在原始圖像上標(biāo)記裂紋部位,并測(cè)量其生長(zhǎng)方向。根據(jù)熒光分布,可以實(shí)時(shí)確定疲勞裂紋長(zhǎng)度和疲勞裂紋擴(kuò)展路徑。這些結(jié)果表明,本文提出的方法在實(shí)際應(yīng)用中對(duì)大型復(fù)雜結(jié)構(gòu)構(gòu)件的裂紋檢測(cè)具有很大的潛力。
第2節(jié)討論了相關(guān)工作。我們?cè)诘?節(jié)中提出了提出的疲勞裂紋檢測(cè)方法。第4節(jié)介紹了實(shí)驗(yàn)過程,結(jié)果見第5節(jié)。第6節(jié)討論了這項(xiàng)工作的貢獻(xiàn)以及局限性。我們?cè)诘?節(jié)中總結(jié)了一個(gè)簡(jiǎn)短的總結(jié)和未來工作的計(jì)劃。
2.相關(guān)工作
疲勞裂紋檢測(cè)是疲勞損傷評(píng)估中最重要的一步,因?yàn)榱鸭y檢測(cè)的準(zhǔn)確性深刻影響疲勞裂紋起裂和擴(kuò)展路徑的預(yù)測(cè)。在此,我們對(duì)不同研究領(lǐng)域的裂紋檢測(cè)相關(guān)工作進(jìn)行了綜述。
2.1.金屬力學(xué)響應(yīng)的實(shí)時(shí)可見檢測(cè)
近年來,純有機(jī)MRL已經(jīng)成功實(shí)現(xiàn)了金屬內(nèi)部應(yīng)力分布和疲勞裂紋擴(kuò)展的動(dòng)態(tài)可視化。通過在金屬表面涂覆有機(jī)MRL膜,可以將金屬的超靈敏力學(xué)響應(yīng)轉(zhuǎn)化為可見的熒光信號(hào)。有機(jī)MRL法測(cè)得的應(yīng)力分布與DIC法或有限元法模擬得到的結(jié)果吻合較好。然而,對(duì)有機(jī)MRL膜機(jī)械響應(yīng)熒光圖像的定量評(píng)估仍然不足,限制了其在實(shí)時(shí)機(jī)械損傷評(píng)估中的應(yīng)用。
2.2.基于視覺的疲勞裂紋檢測(cè)
裂紋檢測(cè)可以定義為計(jì)算機(jī)視覺中的一種物體檢測(cè)。Mohan等人對(duì)使用圖像處理的裂紋檢測(cè)進(jìn)行了全面的調(diào)查,并發(fā)現(xiàn)了使用圖像處理的方法。與傳統(tǒng)的物體檢測(cè)類似,疲勞裂紋檢測(cè)包括降噪、特征提取和分類。通常,Reduction使用過濾器來減少噪聲,二值化來增強(qiáng)對(duì)象(裂紋)。為了檢測(cè)鉻鍍層中的裂紋網(wǎng)絡(luò)圖案區(qū)域,Vidal等人首先將拉普拉斯高斯(LoG)濾波器和Prewitt濾波器結(jié)合起來,然后直接對(duì)所選像素進(jìn)行閾值化,構(gòu)建二值圖像。Heideklang等人提出了一種數(shù)據(jù)融合濾波器,用于改進(jìn)近表面裂紋檢測(cè)。孟等人旨在通過定向梯度直方圖(Histogram of oriented Gradients, HoG)獲取裂紋網(wǎng)絡(luò)信息,并通過分析幾個(gè)案例獲得了更好的二值化閾值。Glud等人采用Gabor濾波器進(jìn)行降噪,采用Otsu方法獲得二值化圖像。形態(tài)學(xué)處理包括(a)初始二值圖像;(b)對(duì)角填充處理;(c)閉合處理;(d)細(xì)化處理;(e)清洗處理(骨架的最終圖像);以及(f)分支點(diǎn)處理。由于特征是從二值圖像中提取的,因此通常提取的裂縫為黑色,背景為白色。
2.3.基于機(jī)器學(xué)習(xí)的疲勞裂紋檢測(cè)
支持向量機(jī)(SVM)、k -最近鄰算法(KNN)、樸素貝葉斯、決策樹、隨機(jī)森林、集成模型和神經(jīng)網(wǎng)絡(luò)(NN)等機(jī)器學(xué)習(xí)模型已被廣泛用于分類。作為機(jī)器學(xué)習(xí)的延伸,深度學(xué)習(xí)模型現(xiàn)在被用于裂紋檢測(cè)。
基于計(jì)算機(jī)視覺的裂紋檢測(cè)方法已經(jīng)取得了良好的性能。但是,閾值的判定比較困難,通常需要人工修改,這就限制了制造業(yè)的發(fā)展。目前,在高精度目標(biāo)檢測(cè)的研究領(lǐng)域,提出了幾種深度學(xué)習(xí)模型。LeNet是第一個(gè)成功分類數(shù)字手寫數(shù)字的深度學(xué)習(xí)模型。提出了AlexNet和GoogleNet,并在更大數(shù)量的分類中取得了很好的精度,后來提出了Inception和Xception ResNet,以獲得更好的精度。但是,這些模型都需要提前手工切割目標(biāo)圖像。后來,YOLO和SSD同時(shí)被提出用于目標(biāo)檢測(cè)和分類,也被用于一些特殊的研究領(lǐng)域,如古文字識(shí)別。
因此,研究人員嘗試將深度學(xué)習(xí)應(yīng)用于裂紋檢測(cè)。Fan等人提出了一個(gè)14層的模型,其中有7個(gè)卷積層。每?jī)蓚€(gè)卷積層之間應(yīng)用一個(gè)最大池化層,最后一個(gè)是連接層。Li等人提出了一個(gè)12層模型,其中兩次三個(gè)卷積層t池化層后應(yīng)用三個(gè)卷積層。接下來的步驟是三個(gè)連接的層,最后一層應(yīng)用了一個(gè)softmax。此外,還提出了一些其他模型,通過使用深度學(xué)習(xí)模型進(jìn)行裂紋檢測(cè)。
然而,深度學(xué)習(xí)的局限性在于需要準(zhǔn)備大量的數(shù)據(jù)進(jìn)行訓(xùn)練。這也證明了為什么提出了大量深度學(xué)習(xí)模型來檢測(cè)混凝土裂縫的原因。本文提出了一種基于計(jì)算機(jī)視覺和機(jī)器學(xué)習(xí)的疲勞裂紋檢測(cè)方法,利用機(jī)器學(xué)習(xí)避免數(shù)據(jù)限制,并嘗試將裂紋檢測(cè)結(jié)果用于疲勞裂紋擴(kuò)展評(píng)價(jià)。我們采用了7種機(jī)器學(xué)習(xí)模型來檢驗(yàn)和選擇裂紋檢測(cè)的模型。
3.機(jī)器學(xué)習(xí)的疲勞裂紋檢測(cè)
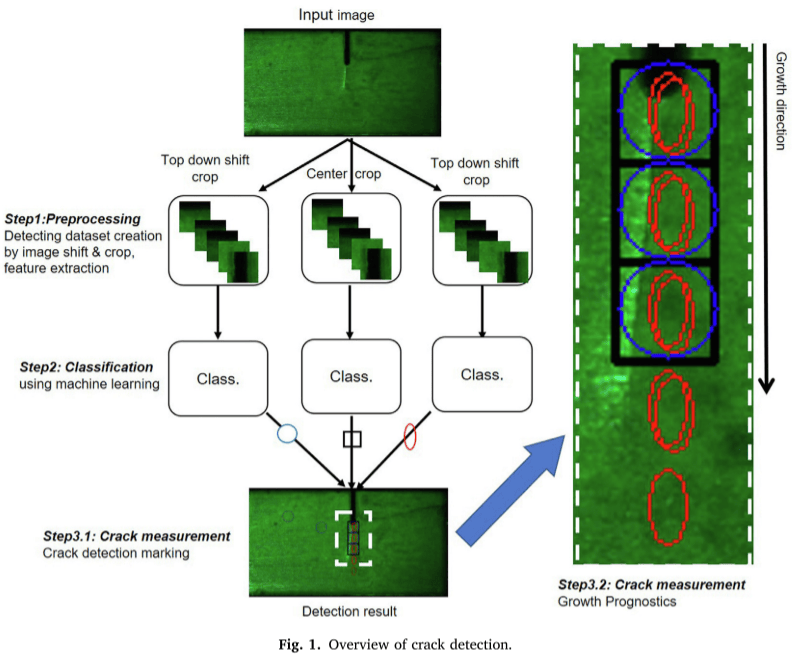
我們提出了一種計(jì)算機(jī)視覺和機(jī)器學(xué)習(xí)相結(jié)合的疲勞裂紋檢測(cè)和增長(zhǎng)路徑預(yù)測(cè)方法。圖1是該方法的概述,它由三個(gè)步驟組成:
步驟1.預(yù)處理用于檢測(cè)數(shù)據(jù)集的創(chuàng)建,將原始圖像分成若干塊,并通過傳統(tǒng)的圖像處理從這些塊中提取特征。
步驟2.使用機(jī)器學(xué)習(xí)進(jìn)行分類,利用機(jī)器學(xué)習(xí)將塊分類為有裂紋和無裂紋。
步驟3.利用分類結(jié)果對(duì)裂紋進(jìn)行測(cè)量,在原始圖像中標(biāo)記裂紋,并利用裂紋的坐標(biāo)來檢測(cè)裂紋的擴(kuò)展方向和長(zhǎng)度。
3.1. 特征提取
特征提取包括二值化、圖像分離和特征像素計(jì)數(shù)。二值化后,每張裁剪后的圖像分別被縱軸和橫軸分割成四個(gè)部分。這意味著裁剪后的圖像被分成16個(gè)部分。然后對(duì)二值化后的圖像中各部分的白像素?cái)?shù)進(jìn)行計(jì)數(shù)。最后得到16個(gè)數(shù)字作為裂縫分類的特征。
3.2. 檢測(cè)數(shù)據(jù)集預(yù)處理
由于原始圖像太大,裂縫有時(shí)小于原始圖像大小,因此應(yīng)將圖像裁剪成幾個(gè)塊。在第一步中,原始圖像被裁剪成幾個(gè)塊。裁剪的動(dòng)作如圖2所示。圖2(a)為簡(jiǎn)單原始圖像,大小為{Size_j, Size_i}。圖2 (b)是中心塊,其大小定義為8?8。
當(dāng)裂縫分類正確時(shí),我們只能得到裂縫的局部信息。這意味著我們只獲得了原始圖像中的裂紋坐標(biāo),這一步很難判斷裂紋的擴(kuò)展方向和長(zhǎng)度。為了解決生長(zhǎng)路徑預(yù)測(cè)的問題,我們從左、右、上、下四個(gè)方向移動(dòng)起點(diǎn),然后裁剪圖像。換擋動(dòng)作如圖2(c)、(d)、(e)、(f)所示,分別表示左換擋、右換擋、上換擋和下?lián)Q擋。移位像素?cái)?shù)定義為步長(zhǎng),如圖2所示,步長(zhǎng)定義為2。
這并不意味著可以在每個(gè)塊中檢測(cè)到裂縫。然而,通過這種方式,可能會(huì)在某些塊中檢測(cè)到裂縫。例如,在圖2(b)的裁剪圖像中存在部分裂紋。通過平移圖像,左移圖像(c)失去了裂縫,而右移圖像中仍然存在一部分裂縫。在這種情況下,可以在(b)和(d)中檢測(cè)到裂縫,并在同一位置進(jìn)行標(biāo)記。

算法1以五個(gè)方向顯示原始圖像的裁剪塊。首先計(jì)算五個(gè)塊的起始點(diǎn)(左上坐標(biāo)),然后檢查溢出。當(dāng)溢出不存在時(shí),塊被裁剪。
3.3. 機(jī)器學(xué)習(xí)分類
我們采用支持向量機(jī)、KNN、樸素貝葉斯、決策樹、隨機(jī)森林、集成模型和神經(jīng)網(wǎng)絡(luò)等7種機(jī)器學(xué)習(xí)模型進(jìn)行檢驗(yàn),并選出裂縫分類的模型。所有這些模型都是傳統(tǒng)模型。
支持向量機(jī)是一種監(jiān)督學(xué)習(xí)模型,用于從最大邊界超平面上確定邊界并對(duì)數(shù)據(jù)進(jìn)行分類。KNN計(jì)算特征空間中的k個(gè)訓(xùn)練數(shù)據(jù)。Na?ve貝葉斯分類器是基于貝葉斯理論的概率分類器,特征之間具有很強(qiáng)的獨(dú)立性假設(shè)。決策樹是一種分類器,它使用樹狀模型進(jìn)行決策及其可能的后果,包括事件結(jié)果的概率、資源成本和效用。決策樹在工業(yè)中廣泛應(yīng)用于各種不確定數(shù)據(jù)領(lǐng)域,如道路裂縫檢測(cè)和生物技術(shù)。隨機(jī)森林結(jié)合了樹的預(yù)測(cè)器,其中每棵樹都獨(dú)立依賴于隨機(jī)向量樣本的值,并且森林中的所有樹都具有相同的分布。
神經(jīng)網(wǎng)絡(luò)是一種研究大腦神經(jīng)元結(jié)構(gòu)的數(shù)學(xué)模型,它為訓(xùn)練數(shù)據(jù)構(gòu)建多層相互連接的節(jié)點(diǎn),通常用于分類。這項(xiàng)工作構(gòu)建了一個(gè)由五層組成的神經(jīng)網(wǎng)絡(luò)模型。輸入層有8個(gè)節(jié)點(diǎn),第二層、第三層、第四層分別有16、32、64個(gè)節(jié)點(diǎn)。前四層的激活為整流線性單元(ReLU),輸出層的激活為s型。對(duì)于參數(shù),epoch設(shè)為50,置信度為0.5,即當(dāng)裂縫分類置信度大于0.5時(shí),判斷預(yù)測(cè)結(jié)果為裂縫,否則判斷預(yù)測(cè)結(jié)果為非裂縫。集成模型通過組合幾個(gè)基本模型來進(jìn)行預(yù)測(cè)。關(guān)鍵思想是通過對(duì)基本模型預(yù)測(cè)進(jìn)行投票,生成最終的預(yù)測(cè)結(jié)果
3.4. 疲勞裂紋擴(kuò)展檢測(cè)
分類后,對(duì)有裂縫的區(qū)域用正方形、橢圓形和圓形標(biāo)記,表示分別從中心塊、左右塊、上下塊檢測(cè)裂縫。將漸降信息用于裂紋擴(kuò)展預(yù)測(cè)。我們使用一個(gè)簡(jiǎn)單的圖像(圖3)來介紹增長(zhǎng)預(yù)測(cè)算法。在這里,我們定義裂紋分支中的裂紋方向變化,這可以通過檢查同類標(biāo)記的退化來找到。例如,在左右裂紋分支的情況下,紅色橢圓從兩個(gè)(左和右)變?yōu)橐粋€(gè)(左)。這意味著疲勞裂紋有向左擴(kuò)展的趨勢(shì)。此外,在上下裂紋分支的情況下,藍(lán)色循環(huán)從兩個(gè)(上下)變?yōu)橐粋€(gè)(上)。這意味著疲勞裂紋擴(kuò)展趨向于減小。因此,得出的結(jié)論是,裂紋擴(kuò)展預(yù)測(cè)是左下的,距離可以通過對(duì)抗檢測(cè)到的裂紋數(shù)來測(cè)量,如圖3中的5?Block_size。

4.疲勞裂紋擴(kuò)展試驗(yàn)過程及熒光響應(yīng)實(shí)驗(yàn)程序
4.1.實(shí)驗(yàn)程序
本文對(duì)航空工業(yè)中常用的結(jié)構(gòu)材料之一A2024鋁合金進(jìn)行了研究。1,1,2,2-四akis (4-nitrophenyl)乙烷(TPE-4N)是一種具有聚集誘導(dǎo)發(fā)射(AIE)特性的純有機(jī)MRL材料,其晶體狀態(tài)被破壞時(shí)表現(xiàn)出敏感的機(jī)械響應(yīng)熒光信號(hào)。文獻(xiàn)詳細(xì)介紹了TPE-4N的熒光特性和成膜過程。在 A2024鋁合金表面形成厚度約為1 μm的均勻結(jié)晶TPE-4N薄膜。疲勞裂紋試驗(yàn)試樣的尺寸和試驗(yàn)裝置如圖 4所示。疲勞裂紋擴(kuò)展試驗(yàn)采用單刃缺口試樣。試件的尺寸如圖 4 (a)所示。通過線電極切割加工一個(gè)尖銳的缺口。圖 4(b)顯示了實(shí)驗(yàn)裝置,其中包括一臺(tái)施加機(jī)械載荷的原位疲勞試驗(yàn)機(jī)(IBTC-5000, CARE)和一個(gè)成像系統(tǒng),該系統(tǒng)包括一個(gè)CCD相機(jī)來捕捉實(shí)時(shí)圖像,一個(gè)紫外燈來提供紫外線,以及一臺(tái)計(jì)算機(jī)來進(jìn)行數(shù)據(jù)分析。在室溫下,在恒力(F?700 N)控制下進(jìn)行疲勞試驗(yàn)。在脈沖循環(huán)拉伸(應(yīng)力比R?0)下,進(jìn)行了恒周期為4s的三角形波形加載。力從0上傳至最大值,再下載至0,記為一個(gè)應(yīng)力循環(huán)。同時(shí),CCD攝像機(jī)記錄了TPE-4N薄膜在不同周期(N)下的實(shí)時(shí)熒光響應(yīng)。用相對(duì)灰度值表示熒光強(qiáng)度,即從背景中去除了灰度值。

4.2.疲勞裂紋擴(kuò)展試驗(yàn)下的熒光響應(yīng)
圖5為A2024鋁合金表面TPE-4N薄膜在單調(diào)張力作用下的熒光響應(yīng)。未變形的試樣表面未觀察到明顯的熒光。相對(duì)灰度隨外加應(yīng)力的增大而逐漸增大。因此,值得注意的是,不可見的機(jī)械應(yīng)力被轉(zhuǎn)化為可見的熒光信號(hào)。此外,更高的應(yīng)力導(dǎo)致更高的熒光強(qiáng)度。圖6為A2024鋁合金單棱缺口疲勞裂紋擴(kuò)展試驗(yàn)時(shí)的熒光圖像。初始樣品中除圖像背景外,熒光信號(hào)不顯著(如圖 6(a)所示)。由圖 6(b) - (e)可以看出,在疲勞裂紋附近出現(xiàn)熒光,熒光擴(kuò)展伴隨著疲勞裂紋擴(kuò)展,應(yīng)力循環(huán)次數(shù)分別為7300、8500、10200、12500。利用熒光信號(hào)可以實(shí)時(shí)監(jiān)測(cè)疲勞裂紋的萌生、擴(kuò)展路徑和長(zhǎng)度。


5.基于機(jī)器學(xué)習(xí)的疲勞裂紋擴(kuò)展預(yù)測(cè)實(shí)驗(yàn)結(jié)果
5.1. 實(shí)驗(yàn)條件
使用Python 3.7和OpenCV編程進(jìn)行預(yù)處理、特征提取和機(jī)器學(xué)習(xí)設(shè)計(jì)。標(biāo)準(zhǔn)平臺(tái)是Anaconda。硬件環(huán)境是一個(gè)CPU (core i7 8th Gen,內(nèi)存:32gb)。測(cè)試映像大小為577?314,目標(biāo)映像的高度為6 mm。塊大小為32?32,步幅(偏移大小)為8像素。因此,裁剪后的目標(biāo)約為0.6毫米。
對(duì)于訓(xùn)練數(shù)據(jù)集的創(chuàng)建,我們將一張圖像分為裂紋部分和非裂紋部分。然后我們將裂縫裁剪成幾個(gè)32?32大小的塊,并使用左、右、上和下移動(dòng)進(jìn)行數(shù)據(jù)集增強(qiáng),以克服裂縫圖像的數(shù)量限制。最后,創(chuàng)建41張裂紋和63張非裂紋大小為32?32的圖像作為訓(xùn)練數(shù)據(jù)集。
5.2. 實(shí)驗(yàn)結(jié)果
我們應(yīng)用了7個(gè)模型進(jìn)行裂縫分類,測(cè)量了這些模型的精度,并將它們與以前的人工裂縫收集進(jìn)行了比較。我們發(fā)現(xiàn)決策樹模型是本研究中的模型,因?yàn)樯窠?jīng)網(wǎng)絡(luò)和樸素貝葉斯方法經(jīng)常發(fā)生過擬合。此外,其他模型經(jīng)常失去裂縫。因此,我們?cè)诒狙芯恐信鋫淞藳Q策樹模型。
圖6 R-a)、R-b)、R-c)、R-d)、R-e)為(a)初始狀態(tài)下的裂紋檢測(cè)結(jié)果;(b) 7300個(gè)周期;(c) 8500次;(d) 10,200個(gè)周期;(e) 12,500個(gè)周期。如圖6 R-a)所示,由于(a)的目標(biāo)圖像為初始狀態(tài),因此未檢測(cè)到裂紋。在圖 6R-b中,圖像的中心有兩個(gè)正方形,在正方形中也標(biāo)記了幾個(gè)橢圓和圓。這意味著在圖像的中心有一個(gè)裂縫。然后在這些標(biāo)記下可以觀察到一個(gè)橢圓,這意味著裂縫現(xiàn)在正在向下擴(kuò)展。如圖6 (R-c)所示,在圖6 (r)所示的最后一個(gè)橢圓上增加了兩個(gè)周期。結(jié)果表明,最后的擴(kuò)展路徑預(yù)測(cè)是正確的,裂紋繼續(xù)向下擴(kuò)展。最后一個(gè)橢圓為左橢圓,表示裂紋擴(kuò)展方向?yàn)樽笙蛳隆H鐖D6 (R-d)所示,在最后一個(gè)橢圓和周期中增加一個(gè)正方形。這也證明了最后的擴(kuò)展預(yù)測(cè)是正確的,裂紋繼續(xù)向下擴(kuò)展。在圖 6(R-e)中檢測(cè)到的裂紋區(qū)域左側(cè)加四個(gè)周期。可以得到類似的增長(zhǎng)趨勢(shì)。
裂紋擴(kuò)展方向和裂紋長(zhǎng)度隨循環(huán)的變化如圖 7所示。發(fā)現(xiàn)裂紋擴(kuò)展方向預(yù)測(cè)正確,在10200 ~ 12500次循環(huán)之間,由于裂紋長(zhǎng)度增加,裂紋擴(kuò)展速度最快(圖中標(biāo)注了大部分裂紋痕跡)。這也證明了我們的建議的有效性,即更長(zhǎng)的周期帶來更長(zhǎng)的裂紋增長(zhǎng)。

6.討論
提出了一種基于機(jī)器學(xué)習(xí)的疲勞裂紋擴(kuò)展檢測(cè)方法,該方法將計(jì)算機(jī)視覺與機(jī)器學(xué)習(xí)相結(jié)合。實(shí)驗(yàn)結(jié)果表明,該方法能準(zhǔn)確監(jiān)測(cè)疲勞裂紋的擴(kuò)展情況,包括裂紋長(zhǎng)度和裂紋路徑。且長(zhǎng)度精度水平為一塊尺寸為0.6 mm,可用于實(shí)際應(yīng)用。由于時(shí)間較短,本研究使用了兩種分類機(jī)器學(xué)習(xí)模型(決策樹),計(jì)算時(shí)間幾乎是實(shí)時(shí)的。
但是,由于弱裂紋數(shù)據(jù)集和光線變化的影響,實(shí)驗(yàn)結(jié)果中出現(xiàn)了一些檢測(cè)誤差,如圖中圖像左側(cè)的檢測(cè)誤差(Rb)。有時(shí),錯(cuò)誤檢測(cè)發(fā)生在圖像的探測(cè)中。由于光線變化很小,因此光校正并不是克服這一問題的有效方法。幸運(yùn)的是,這種誤差不會(huì)在集中時(shí)發(fā)生,因此我們可以消除這些分散的標(biāo)記,以克服光影響的問題
此外,盡管根據(jù)相關(guān)工作,深度學(xué)習(xí)可能是一種很好的裂紋檢測(cè)方法,但應(yīng)用幾種裂紋檢測(cè)模型并沒有達(dá)到比機(jī)器學(xué)習(xí)方法更好的精度。原因與訓(xùn)練數(shù)據(jù)集的弱點(diǎn)有關(guān)。
結(jié)論
提出了一種結(jié)合計(jì)算機(jī)視覺和機(jī)器學(xué)習(xí)的基于機(jī)器學(xué)習(xí)的疲勞裂紋擴(kuò)展檢測(cè)方法。利用計(jì)算機(jī)視覺進(jìn)行數(shù)據(jù)生成,利用機(jī)器學(xué)習(xí)模型進(jìn)行裂紋檢測(cè),然后利用計(jì)算機(jī)視覺分析疲勞裂紋擴(kuò)展路徑和長(zhǎng)度。實(shí)驗(yàn)結(jié)果證明了該方法對(duì)疲勞裂紋擴(kuò)展路徑預(yù)測(cè)的有效性,獲得的裂紋長(zhǎng)度測(cè)量精度為0.6 mm。此外,輕微的機(jī)器學(xué)習(xí)模型(決策樹)幫助我們實(shí)現(xiàn)實(shí)時(shí)的裂紋檢測(cè)。但是,由于裂紋數(shù)據(jù)本身的缺陷和受的影響較小,在今后的工作中存在一定的誤差,需要加以糾正。
算法1.數(shù)據(jù)集創(chuàng)建

相關(guān)產(chǎn)品




免責(zé)聲明
- 凡本網(wǎng)注明“來源:化工儀器網(wǎng)”的所有作品,均為浙江興旺寶明通網(wǎng)絡(luò)有限公司-化工儀器網(wǎng)合法擁有版權(quán)或有權(quán)使用的作品,未經(jīng)本網(wǎng)授權(quán)不得轉(zhuǎn)載、摘編或利用其它方式使用上述作品。已經(jīng)本網(wǎng)授權(quán)使用作品的,應(yīng)在授權(quán)范圍內(nèi)使用,并注明“來源:化工儀器網(wǎng)”。違反上述聲明者,本網(wǎng)將追究其相關(guān)法律責(zé)任。
- 本網(wǎng)轉(zhuǎn)載并注明自其他來源(非化工儀器網(wǎng))的作品,目的在于傳遞更多信息,并不代表本網(wǎng)贊同其觀點(diǎn)和對(duì)其真實(shí)性負(fù)責(zé),不承擔(dān)此類作品侵權(quán)行為的直接責(zé)任及連帶責(zé)任。其他媒體、網(wǎng)站或個(gè)人從本網(wǎng)轉(zhuǎn)載時(shí),必須保留本網(wǎng)注明的作品第一來源,并自負(fù)版權(quán)等法律責(zé)任。
- 如涉及作品內(nèi)容、版權(quán)等問題,請(qǐng)?jiān)谧髌钒l(fā)表之日起一周內(nèi)與本網(wǎng)聯(lián)系,否則視為放棄相關(guān)權(quán)利。


 采購中心
采購中心